SIA5 小型移载、组装机器人
编号
SIA5 7轴机器人
简介
可搬质量:5kg, 7轴垂直多关节机器人
 产品特色
产品特色MOTOMAN-SIA5系列是7轴垂直多关节类型的机器人。像人的"手臂"一样可做出柔软的活动和呈现出各式各样的姿势,蹲低姿态下的夹具作业、装置等等背部环绕动作,即使是在狭窄的地方也可设置与操作,可以省下大量的空间。
可搬运人和同等级的重量物,根据宽广的动作范围,高精度、高速动作等,在制造业和物流关联等的搬运,和装配工作等地方上能够活跃的新设想的机器人。可代替人的工作,工作时间缩短,省空间化,生产率提高。
设置方法除了置地式,还有壁挂式,倒挂式可供选择。
因为加上防尘型的控制器“DX100”,所以也可使用小形、轻量的控制器“FS100”(IP20配置)上的动作。
特长1 和人的手臂一样的自由性
关节部装有空心执行机构(齿轮等内建),比起以前的机型更加省空间且可以做出更灵活的动作。
与人的"手臂"同样的可自在的活动和可以达成各种姿势外,通过高精度、高速动作能贡献为生产率提高。
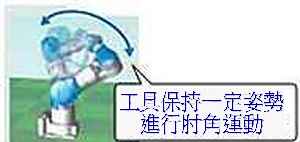
由于有新的第7轴的肘来当作新的轴,实现以前的6轴垂直多关节机器人不能实现的肘角动作(在保持工具的位置、姿势,以一定以肘为中心改变机器人的姿势的动作)。
 |  |  |
| 在机床上安装与卸下之工作 | 在狭窄空间内的机器组装工程 |
特长2 由于手臂的精简化、省空间化,可以架设出紧凑有效率的生产线
根据设备的较小化,可以在以前的机器人和人工作困难狭窄的间隙内设置机器和工作。
机器和周边设备的无干涉搬送,复数机器人间的无干涉装配等,不仅使各种应用程序的适用范围扩大,生产、物流线的省空间化,还可以构筑出高密度机器人系统。
 |  |
| 在机床上安装与卸下之工作 | 在狭窄空间内的机器组装工程 |
特长3 在臂内装有电缆和软管,并将电缆的问题降到最小化
独自的空中结构执行机构,在臂内装有电缆和软管,不会露出外部。
将与其他设备之干涉影响降至最小,为了排除电缆的干涉与外力的影响,并且拉近工作与夹具的距离,而将电路设计成紧凑型电路,同时并能将电缆的问题降到最小化。
| 名称 | MOTOMAN-SIA5D | |
| MOTOMAN-SIA5F | ||
| 形式 | YR-SIA005D-A00(DX100) | |
| YR-SIA005F-A00(FS100) | ||
| 动作形态 | 垂直多関节形 | |
| 自由度 | 7轴 | |
| 可搬质量 | 5kg | |
| 往复精度* | ±0.06mm | |
| 动作范围 | S轴(旋回) | -180° ~ +180° |
| L轴(下腕) | -110° ~ +110° | |
| E轴(肘) | -170° ~ +170° | |
| U轴(上腕) | -90° ~ +115° | |
| R轴(上腕回転) | -180° ~ +180° | |
| B轴(手首俯仰/横摆) | -110° ~ +110° | |
| T轴(手首回転) | -180° ~ +180° | |
| 最大速度 | S轴(旋回) | 3.49rad/s(200°/s) |
| L轴(下腕) | 3.49rad/s(200°/s) | |
| E轴(肘) | 3.49rad/s(200°/s) | |
| U轴(上腕) | 3.49rad/s(200°/s) | |
| R轴(上腕回転) | 3.49rad/s(200°/s) | |
| B轴(手首振り) | 4.01rad/s(230°/s) | |
| T轴(手首回転) | 6.11rad/s(350°/s) | |
| 手首许容惯性 | R轴(上腕回転) | 14.7N・m(1.5kgf・m) |
| B轴(手首俯仰/横摆) | 14.7N・m(1.5kgf・m) | |
| T轴(手首回転) | 7.35N・m(0.75kgf・m) | |
| 手首容许惯性距(GD2/4) | R轴(手首旋回) | 0.45kg・m2 |
| B轴(手首俯仰/横摆) | 0.45kg・m2 | |
| T轴(手首回転) | 0.11kg・m2 | |
| 本体质量 | 30kg | |
| 设置环境 | 温度 | 0~+40℃ |
| 湿度 | 20~80%RH(不能结露) | |
| 振动加速度 | 4.9m/s2以下 | |
| 其他 | ・没有引火性及腐蚀性的气体与液体 | |
| ・水,油,粉尘等不会进入 | ||
| ・不能距电气噪声源太近(电浆) | ||
| 电源容量 | 1.0kVA | |
*符合 JIS B 8432
(注)本表采用SI单位
但,( )里面写有重力单位。
特点| 小型 | 此控制柜尺寸为19英寸,可设置在传送机下方。  宽 × 厚 × 高470 × 420 × 200mm,重量为20kg的小型机型。 可对应负载为20kg以下的机器人。 同时,可对应双臂机器人及双机协调动作。 (双臂机器人,双机协调机器人用,双层重叠尺寸为470 × 420 × 420mm,品质48kg) |
| 高速控制 | 通过提高阶梯扫描时间,输入输出命令分解性能,应答性能,从而使综合控制性能达到更高速化。 提高了输入输出的监视周期及应答速度,因信号输出时间可以用1ms单位进行微调整,故可以设定出与外部设备的最佳配合时间及最快速度。另外,通过跟踪感测器应答性的高速化从而提高了追从性及应答性。同时在高速动作机型中因配有防止抓手摇晃功能,可以缩短定位时间。 对于同步传送的工件搬运,因配有便利的专用命令,从而缩短了示教时间。 |
| 开放化 | 可根据使用者及用途开发独特功能及专用画面。 可以将所有机器人控制柜功能及语言所实现的动作程式及用途体现在电脑上。 另外,针对在机器人控制柜INFORM中难以实现的部分,灵活且详细的动作控制程式方可在电脑上制作并进行控制。 |
 | MotoPlus功能 |
| 通过C语言可以开发INFORM语言及CIO LADDER中难以实现,高度且自由的机器人控制用途。在开发环境MotoPlusIDE(选项)中,通过使用MotoPlus功能,对开发机器人用途方面给予了大力协助。 | |
| MotomanSync功能(选项) |
| 在MotomanSync-PC功能中,通过使用C,C++,VisualBasic等程式设计语言开发出来的用途,可通过电脑对FS100直接进行控制。为了在不使用机器人语言INFORM的条件下可以直接通过电脑控制FS100,技术精湛的开发者迅速开发了灵活且高度的客户化机器人用途。同时,提供可通过控制柜MP3200的LADDER程控机器人的MotomanSync-MP功能。 | |
| 示教程式设计器客户化功能(选项) |
| 可根据VC++,C#语言,开发结合客户及用途的示教程式设计器操作画面。 | |
| I/F面板功能(选项) |
| 在示教程式设计器上可以显示与操作面板同样的操作开关。与梯形图编集功能(选项)结合,可实现迅速的系统构筑及灵活变更。 |
示教程式设计器(选项)*- 将机器人操作时必要的开关,按键,键盘配置的更容易操作。从示教,编集到保养,可进行全程操作。
- 通过多视窗表示,可以在看到多个画面的同时进行示教,从而减少了操作次数,缩短了示教时间。
- 为对应7轴动作的机械手臂,设置了第8轴的操作键。不需要同时按键即可进行轴操作。
- 重量实现了全球最轻化。另外在程式设计划面中的梯形图编辑(选项),画面字体大小,字体及颜色等有8种变更功能或根据使用环境而改变键盘尺寸的功能等,实现了更加实用的示教程式设计器。*:操作时较少需要1个示教程式设计器,另外1个示教程式设计器可对应多台机器人。
软件程式设计(选项)通过电脑可对FS100进行监控并操作。*
1台电脑可切换连接多个FS100。 基本功能,操作性与示教程式设计器相同。**:没有依靠硬件的功能。
・・ 急停键(需另行配置)
・・ 手动抱闸解除功能,超限解除功能
・・ 可实现从安全栏外启动机器人。
・・ 安全栏以内的机器人示教作业需要示教程式设计器。
控制器规格DX100特长新型的高性能机器人控制柜DX100,实现了高动作性能,传承了到目前为止开发的控制手臂功能的同时,在生产现场通过缩短生产节拍及高密度配置,在节省空间方面,实现了更高性能,更高功能及追求小型化的目标。实现了生产线的短工序化,为生产管理及生产线的启动,降低生产成本作出贡献。同时,通过强化软件及高性能,提高了操作性及易用性,是一款结合现场作业的国内标准型,7轴多关节,双臂型机器人。
- 通过高密度配置可节省生产线的空间,提高生产节拍,1台控制柜最多可控制8台机器人,24个外部轴。同时缩小了控制柜的宽幅及尺寸,与传统机型相比,实现了轻量化(标准约为100kg)。 例如:在小型机器人的使用中设置面积削减了24%,大型机器人的使用中,设置面积削减了42%,重量减轻约33%。在双臂型机器人用途中,通过缩小外形尺寸,设置面积削减了17%,本体重量削减了25%,重量约150 kg。 在所有机型当中,与传统NX100相比,实现了控制柜的小型及轻量化,同时削减了设置面积。
- 具备机器人之间或与周边设备之间防碰撞的干涉确认功能,同时具备机器人或工具与工件,周边设备发生干涉时的影响降低至较小化功能,并具备防碰撞检出功能。
- 可对周边设备进行控制
内置PLC软件,可以通过机器人控制柜对夹具或周边设备进行控制。另外,输入输出点数从传统机型NX100的1024/1024扩大到2048/2048。
 |  |  |
国内标准型 小型~大型机型 | 7轴多关节 机器人用 | 双臂型 机器人用 |
示教程式设计器配置了机器人操作时必要的开关,按键或键盘。可以对示教的运转状态到周边设备进行控制。
具备机器人的资料备份及输入用小型闪光卡插口,USB存储用的插口,从而使资料管理更加轻松化。
作为拥有彩色触控式萤幕机器人用途的示教程式设计器,非常轻便。
 通过多视窗表示,在可以看到多个画面的同时进行示教,也可以同时监控多个画面状态,从而缩短了示教时间。
通过多视窗表示,在可以看到多个画面的同时进行示教,也可以同时监控多个画面状态,从而缩短了示教时间。- 通过画面可调节字体尺寸功能,8种颜色,字体多变功能,以及根据环境按键尺寸可变更等功能,实现了示教程式设计器的易操作性。
- 通过设置第8轴操作键,轻松实现了外部轴操作及对7轴机械手的操作。
- I/F面板具备和操作面板同样的画面及功能,从而省略了外部操作面板,通过使用程式设计划面上的梯形图编辑功能(选项),轻松实现输入输出信号的变更,监控及调试作业。另外,在示教程式设计器客户化功能(选项)中,通过VC++语言开发的用途可以在程式设计上动作,通过程式设计还可以给客户及SI提供独特的操作画面。
示教编程器(选项)*| 项目 | DX100 规格* | FS100 规格 |
| 构造 | 防尘构造 | 开放构造(IP20) |
| 外形寸法 (包含凸起的部分) | 标准形(在日本国内小形~大型机种): | 标准形: |
| 425(长)×450(宽)×1200(高)mm | 470(长)×420(宽)×200(高)mm | |
| 7轴多関节机器人用: | 双腕形机器人,2台强调机器人用: | |
| 500(长)×580(宽)×580(高)mm | 470(长)×420(宽)×420(高)mm | |
| 双腕形机器人用: | ||
| 500(长)× 580(宽)× 880(高)mm | ||
| EPH130系列: | ||
| 425(长)× 450(宽)× 1400(高)mm | ||
| EPH4000系列: | ||
| 1000(长)× 650(宽)× 1591(高)mm | ||
| 大约重量 | 标准形小形机种,7轴多関节机器人:100kg | 20kg |
| 标准形大形机种,双腕形机器人:150kg | (双腕形机器人,2台强调机器人用时48kg) | |
| EPH4000系列:400kg | ||
| 冷却方式 | 间接冷却 | 直接冷却 |
| 周囲温度 | 通电时:0~+45℃,保管时:-10~+60℃ | 通电时:0~+40℃,保管时:-10~+60℃ |
| 相対湿度 | 最大90%(不能结露) | |
| 电源规格 | 三相AC200V/220V(+10%,-15%) 60Hz(±2%) (日本国内规格) | 三相AC200V/220V(+10%,-15%),50/60Hz |
| 三相AC200V(+10%,-15%)50Hz(±2%)(日本国内规格) | 単相AC200V/230V(+10%,-15%),50/60Hz | |
| 接地 | D种(接地抵抗100Ω以下専用接地) | |
| 入出力信号 | 専用信号:入力23,出力5 | 専用信号:入力10,出力1 |
| 汎用信号:入力40,出力40 | 汎用信号:入力28,出力28 | |
| 最大入出力信号(选配型): | 最大入出力信号(选配型): | |
| 入力2048,出力2048 | 入力1024,出力1024 | |
| 位置控制方式 | 串列编码器 | |
| 内存容量 | JOB:200000 步骤,10000 机器人指令 | JOB:10000步骤,1000机器人指令 |
| CIO 阶梯图:150000 步骤(标准),20000 步骤(可扩充) | CIO 阶梯图:1500 步骤 | |
| 可扩充槽 | PCI:2槽(主CPU),1槽(伺服CPU) | MP2000 接线排 × 5 槽 |
| 另外,传感器基板专用配备插槽1个 | ||
| LAN(连接上位机) | 1个(10Base-T/100Base-TX) | |
| 串接界面I/F | RS-232C:1个 | |
| 控制方式 | 软件伺服 | |
| 驱动元件 | 标准6轴(视机种而定) | 标准6轴(视机种而定) |
| 外部1轴内蔵可能(7轴机器人,双腕机器人) | 外部1轴内蔵可能(7轴机器人,双腕机器人) | |
| 外部2轴内蔵可能(大形机种) | 外部2轴内蔵可能(标准规格) | |
| 外部3轴内蔵可能(小形机种) | ||
| 涂装色 | 芒塞尔 5Y7/1相当 |
*:外销规格时外形尺寸、质量、电源规格会有不一样。
程示示教盘规格*| 项目 | 规格(FS100用:选配型) | 规格(FS100用:选配型) |
| 形式 | JZRCR-YPP01-1 | JZRCR-YPP03-1 |
| 外形寸法 | 169(长)× 314.5(高度)× 50(深度)mm | |
| 概略质量 | 0.986kg | |
| 材质 | 强化塑钢 | |
| 操作机器 | 选择键、轴操作键、数值/应用键 附有钥匙的模式转换开关(模式:示教、喷涂、远程) 非常停止按钮,启动开关 便捷快闪记忆卡插槽 × 1 USB 埠界面 × 1(USB记忆用) | |
| 显示 | 5.7吋彩色液晶LCD,触控银幕640 × 480点 (汉字、平假名、片假名、英数字、其他) | |
| 保护等级 | IP65 | |
| 电缆长度 | 标准:8m,最大(选配型):36m | 标准:8m,最大(选配型):20m |