SIA5 小型移載、組裝機器人
No.
SIA5 7軸機器人
Intro.
可搬質量:5kg, 7軸垂直多關節機器人
 產品特色
產品特色MOTOMAN-SIA5系列是7軸垂直多關節類型的機器人。像人的"手臂"一樣可做出柔軟的活動和呈現出各式各樣的姿勢,蹲低姿態下的夾具作業、裝置等等背部環繞動作,即使是在狹窄的地方也可設置與操作,可以省下大量的空間。
可搬運人和同等級的重量物,根據寬廣的動作範圍,高精度、高速動作等,在製造業和物流關聯等的搬運,和裝配工作等地方上能夠活躍的新設想的機器人。可代替人的工作,工作時間縮短,省空間化,生產率提高。
設置方法除了置地式,還有壁掛式,倒掛式可供選擇。
因為加上防塵型的控制器「DX100」,所以也可使用小形、輕量的控制器「FS100」(IP20配置)上的動作。
特長1 和人的手臂一樣的自由性
關節部裝有空心執行機構(齒輪等內建),比起以前的機型更加省空間且可以做出更靈活的動作。
與人的"手臂"同樣的可自在的活動和可以達成各種姿勢外,通過高精度、高速動作能貢獻為生產率提高。
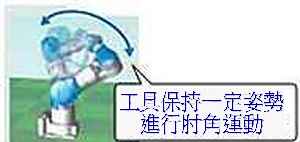
由於有新的第7軸的肘來當作新的軸,實現以前的6軸垂直多關節機器人不能實現的肘角動作(在保持工具的位置、姿勢,以一定以肘為中心改變機器人的姿勢的動作)。
 |  |  |
| 在機床上安裝與卸下之工作 | 在狹窄空間內的機器組裝工程 |
特長2 由於手臂的精簡化、省空間化,可以架設出緊湊有效率的生產線
根據設備的較小化,可以在以前的機器人和人工作困難狹窄的間隙內設置機器和工作。
機器和周邊設備的無干涉搬送,複數機器人間的無干涉裝配等,不僅使各種應用程式的適用範圍擴大,生產、物流線的省空間化,還可以構築出高密度機器人系統。
 |  |
| 在機床上安裝與卸下之工作 | 在狹窄空間內的機器組裝工程 |
特長3 在臂內裝有電纜和軟管,並將電纜的問題降到較小化
獨自的空中結構執行機構,在臂內裝有電纜和軟管,不會露出外部。
將與其他設備之干涉影響降至較小,為了排除電纜的干涉與外力的影響,並且拉近工作與夾具的距離,而將電路設計成緊湊型電路,同時並能將電纜的問題降到較小化。
| 名稱 | MOTOMAN-SIA5D | |
| MOTOMAN-SIA5F | ||
| 形式 | YR-SIA005D-A00(DX100) | |
| YR-SIA005F-A00(FS100) | ||
| 動作形態 | 垂直多関節形 | |
| 自由度 | 7軸 | |
| 可搬質量 | 5kg | |
| 往復精度* | ±0.06mm | |
| 動作範圍 | S軸(旋回) | -180° ~ +180° |
| L軸(下腕) | -110° ~ +110° | |
| E軸(肘) | -170° ~ +170° | |
| U軸(上腕) | -90° ~ +115° | |
| R軸(上腕回転) | -180° ~ +180° | |
| B軸(手首俯仰/橫擺) | -110° ~ +110° | |
| T軸(手首回転) | -180° ~ +180° | |
| 較大速度 | S軸(旋回) | 3.49rad/s(200°/s) |
| L軸(下腕) | 3.49rad/s(200°/s) | |
| E軸(肘) | 3.49rad/s(200°/s) | |
| U軸(上腕) | 3.49rad/s(200°/s) | |
| R軸(上腕回転) | 3.49rad/s(200°/s) | |
| B軸(手首振り) | 4.01rad/s(230°/s) | |
| T軸(手首回転) | 6.11rad/s(350°/s) | |
| 手首許容慣性 | R軸(上腕回転) | 14.7N・m(1.5kgf・m) |
| B軸(手首俯仰/橫擺) | 14.7N・m(1.5kgf・m) | |
| T軸(手首回転) | 7.35N・m(0.75kgf・m) | |
| 手首容許慣性距(GD2/4) | R軸(手首旋回) | 0.45kg・m2 |
| B軸(手首俯仰/橫擺) | 0.45kg・m2 | |
| T軸(手首回転) | 0.11kg・m2 | |
| 本體質量 | 30kg | |
| 設置環境 | 溫度 | 0~+40℃ |
| 濕度 | 20~80%RH(不能結露) | |
| 振動加速度 | 4.9m/s2以下 | |
| 其他 | ・沒有引火性及腐蝕性的氣體與液體 | |
| ・水,油,粉塵等不會進入 | ||
| ・不能距電氣噪聲源太近(電漿) | ||
| 電源容量 | 1.0kVA | |
*符合 JIS B 8432
(注)本表採用SI單位
但,( )裡面寫有重力單位。
特點| 小型 | 此控制櫃尺寸為19英寸,可設置在傳送機下方。  寬 × 厚 × 高470 × 420 × 200mm,重量為20kg的小型機型。 可對應負載為20kg以下的機器人。 同時,可對應雙臂機器人及雙機協調動作。 (雙臂機器人,雙機協調機器人用,雙層重疊尺寸為470 × 420 × 420mm,品質48kg) |
| 高速控制 | 通過提高階梯掃描時間,輸入輸出命令分解性能,應答性能,從而使綜合控制性能達到更高速化。 提高了輸入輸出的監視週期及應答速度,因信號輸出時間可以用1ms單位進行微調整,故可以設定出與外部設備的較佳配合時間及較快速度。另外,通過跟蹤感測器應答性的高速化從而提高了追從性及應答性。同時在高速動作機型中因配有防止抓手搖晃功能,可以縮短定位時間。 對於同步傳送的工件搬運,因配有便利的專用命令,從而縮短了示教時間。 |
| 開放化 | 可根據使用者及用途開發獨特功能及專用畫面。 可以將所有機器人控制櫃功能及語言所實現的動作程式及用途體現在電腦上。 另外,針對在機器人控制櫃INFORM中難以實現的部分,靈活且詳細的動作控制程式方可在電腦上製作並進行控制。 |
 | MotoPlus功能 |
| 通過C語言可以開發INFORM語言及CIO LADDER中難以實現,高度且自由的機器人控制用途。在開發環境MotoPlusIDE(選項)中,通過使用MotoPlus功能,對開發機器人用途方面給予了大力協助。 | |
| MotomanSync功能(選項) |
| 在MotomanSync-PC功能中,通過使用C,C++,VisualBasic等程式設計語言開發出來的用途,可通過電腦對FS100直接進行控制。為了在不使用機器人語言INFORM的條件下可以直接通過電腦控制FS100,技術精湛的開發者迅速開發了靈活且高度的客戶化機器人用途。同時,提供可通過控制櫃MP3200的LADDER程式控制機器人的MotomanSync-MP功能。 | |
| 示教程式設計器客戶化功能(選項) |
| 可根據VC++,C#語言,開發結合客戶及用途的示教程式設計器操作畫面。 | |
| I/F面板功能(選項) |
| 在示教程式設計器上可以顯示與操作面板同樣的操作開關。與梯形圖編集功能(選項)結合,可實現迅速的系統構築及靈活變更。 |
示教程式設計器(選項)*- 將機器人操作時必要的開關,按鍵,鍵盤配置的更容易操作。從示教,編集到保養,可進行全程操作。
- 通過多視窗表示,可以在看到多個畫面的同時進行示教,從而減少了操作次數,縮短了示教時間。
- 為對應7軸動作的機械手臂,設置了第8軸的操作鍵。不需要同時按鍵即可進行軸操作。
- 重量實現了全球較輕化。另外在程式設計畫面中的梯形圖編輯(選項),畫面字體大小,字體及顏色等有8種變更功能或根據使用環境而改變鍵盤尺寸的功能等,實現了更加實用的示教程式設計器。*:操作時較少需要1個示教程式設計器,另外1個示教程式設計器可對應多台機器人。
軟體程式設計(選項)通過電腦可對FS100進行監控並操作。*
1台電腦可切換連接多個FS100。 基本功能,操作性與示教程式設計器相同。**:沒有依靠硬體的功能。
・・ 急停鍵(需另行配置)
・・ 手動抱閘解除功能,超限解除功能
・・ 可實現從安全欄外啟動機器人。
・・ 安全欄以內的機器人示教作業需要示教程式設計器。
控制器規格DX100特長較新型的高性能機器人控制櫃DX100,實現了高動作性能,傳承了到目前為止開發的控制手臂功能的同時,在生產現場通過縮短生產節拍及高密度配置,在節省空間方面,實現了更高性能,更高功能及追求小型化的目標。實現了生產線的短工序化,為生產管理及生產線的啟動,降低生產成本作出貢獻。同時,通過強化軟體及高性能,提高了操作性及易用性,是一款結合現場作業的國內標準型,7軸多關節,雙臂型機器人。
- 通過高密度配置可節省生產線的空間,提高生產節拍,1台控制櫃較多可控制8台機器人,24個外部軸。同時縮小了控制櫃的寬幅及尺寸,與傳統機型相比,實現了輕量化(標準約為100kg)。 例如:在小型機器人的使用中設置面積削減了24%,大型機器人的使用中,設置面積削減了42%,重量減輕約33%。在雙臂型機器人用途中,通過縮小外形尺寸,設置面積削減了17%,本體重量削減了25%,重量約150 kg。 在所有機型當中,與傳統NX100相比,實現了控制櫃的小型及輕量化,同時削減了設置面積。
- 具備機器人之間或與周邊設備之間防碰撞的干涉確認功能,同時具備機器人或工具與工件,周邊設備發生干涉時的影響降低至較小化功能,並具備防碰撞檢出功能。
- 可對周邊設備進行控制
內置PLC軟體,可以通過機器人控制櫃對夾具或周邊設備進行控制。另外,輸入輸出點數從傳統機型NX100的1024/1024擴大到2048/2048。
 |  |  |
國內標準型 小型~大型機型 | 7軸多關節 機器人用 | 雙臂型 機器人用 |
示教程式設計器配置了機器人操作時必要的開關,按鍵或鍵盤。可以對示教的運轉狀態到周邊設備進行控制。
具備機器人的資料備份及輸入用小型閃光卡插口,USB存儲用的插口,從而使資料管理更加輕鬆化。
作為擁有彩色觸控式螢幕機器人用途的示教程式設計器,非常輕便。
 通過多視窗表示,在可以看到多個畫面的同時進行示教,也可以同時監控多個畫面狀態,從而縮短了示教時間。
通過多視窗表示,在可以看到多個畫面的同時進行示教,也可以同時監控多個畫面狀態,從而縮短了示教時間。- 通過畫面可調節字體尺寸功能,8種顏色,字體多變功能,以及根據環境按鍵尺寸可變更等功能,實現了示教程式設計器的易操作性。
- 通過設置第8軸操作鍵,輕鬆實現了外部軸操作及對7軸機械手的操作。
- I/F面板具備和操作面板同樣的畫面及功能,從而省略了外部操作面板,通過使用程式設計畫面上的梯形圖編輯功能(選項),輕鬆實現輸入輸出信號的變更,監控及調試作業。另外,在示教程式設計器客戶化功能(選項)中,通過VC++語言開發的用途可以在程式設計上動作,通過程式設計還可以給客戶及SI提供獨特的操作畫面。
示教編程器(選項)*| 項目 | DX100 規格* | FS100 規格 |
| 構造 | 防塵構造 | 開放構造(IP20) |
| 外形寸法 (包含凸起的部分) | 標準形(在日本國內小形~大型機種): | 標準形: |
| 425(長)×450(寬)×1200(高)mm | 470(長)×420(寬)×200(高)mm | |
| 7軸多関節機器人用: | 雙腕形機器人,2台強調機器人用: | |
| 500(長)×580(寬)×580(高)mm | 470(長)×420(寬)×420(高)mm | |
| 雙腕形機器人用: | ||
| 500(長)× 580(寬)× 880(高)mm | ||
| EPH130系列: | ||
| 425(長)× 450(寬)× 1400(高)mm | ||
| EPH4000系列: | ||
| 1000(長)× 650(寬)× 1591(高)mm | ||
| 大約重量 | 標準形小形機種,7軸多関節機器人:100kg | 20kg |
| 標準形大形機種,雙腕形機器人:150kg | (雙腕形機器人,2台強調機器人用時48kg) | |
| EPH4000系列:400kg | ||
| 冷卻方式 | 間接冷卻 | 直接冷卻 |
| 周囲溫度 | 通電時:0~+45℃,保管時:-10~+60℃ | 通電時:0~+40℃,保管時:-10~+60℃ |
| 相対濕度 | 較大90%(不能結露) | |
| 電源規格 | 三相AC200V/220V(+10%,-15%) 60Hz(±2%) (日本國內規格) | 三相AC200V/220V(+10%,-15%),50/60Hz |
| 三相AC200V(+10%,-15%)50Hz(±2%)(日本國內規格) | 単相AC200V/230V(+10%,-15%),50/60Hz | |
| 接地 | D種(接地抵抗100Ω以下専用接地) | |
| 入出力信號 | 専用信號:入力23,出力5 | 専用信號:入力10,出力1 |
| 汎用信號:入力40,出力40 | 汎用信號:入力28,出力28 | |
| 較大入出力信號(選配型): | 較大入出力信號(選配型): | |
| 入力2048,出力2048 | 入力1024,出力1024 | |
| 位置控制方式 | 串列編碼器 | |
| 記憶體容量 | JOB:200000 步驟,10000 機器人指令 | JOB:10000步驟,1000機器人指令 |
| CIO 階梯圖:150000 步驟(標準),20000 步驟(可擴充) | CIO 階梯圖:1500 步驟 | |
| 可擴充槽 | PCI:2槽(主CPU),1槽(伺服CPU) | MP2000 接線排 × 5 槽 |
| 另外,傳感器基板專用配備插槽1個 | ||
| LAN(連接上位機) | 1個(10Base-T/100Base-TX) | |
| 串接介面I/F | RS-232C:1個 | |
| 控制方式 | 軟體伺服 | |
| 驅動元件 | 標準6軸(視機種而定) | 標準6軸(視機種而定) |
| 外部1軸內蔵可能(7軸機器人,雙腕機器人) | 外部1軸內蔵可能(7軸機器人,雙腕機器人) | |
| 外部2軸內蔵可能(大形機種) | 外部2軸內蔵可能(標準規格) | |
| 外部3軸內蔵可能(小形機種) | ||
| 塗裝色 | 芒塞爾 5Y7/1相當 |
*:外銷規格時外形尺寸、質量、電源規格會有不一樣。
程示示教盤規格*| 項目 | 規格(FS100用:選配型) | 規格(FS100用:選配型) |
| 形式 | JZRCR-YPP01-1 | JZRCR-YPP03-1 |
| 外形寸法 | 169(長)× 314.5(高度)× 50(深度)mm | |
| 概略質量 | 0.986kg | |
| 材質 | 強化塑鋼 | |
| 操作機器 | 選擇鍵、軸操作鍵、數值/應用鍵 附有鑰匙的模式轉換開關(模式:示教、噴塗、遠程) 非常停止按鈕,啟動開關 便捷快閃記憶卡插槽 × 1 USB 埠介面 × 1(USB記憶用) | |
| 顯示 | 5.7吋彩色液晶LCD,觸控銀幕640 × 480點 (漢字、平假名、片假名、英數字、其他) | |
| 保護等級 | IP65 | |
| 電纜長度 | 標準:8m,較大(選配型):36m | 標準:8m,較大(選配型):20m |